Speaker
Description
In this contribution we present development of a device and means of establishing low magnetic fields (<1nT), such as a remanence in a magnetic shield. In a previous development [1], we used a rotating AMR magnetometer for establishing and maintaining near-zero field in a coil system, where rotation enables suppression of the inherent sensor offset and its drift without frequent recalibrations. However, the AMR system suffered from the elevated noise (>100 $\mathrm{pT/\sqrt{Hz}}$ @ 1 Hz), limiting its practical use for fields smaller than 1 nT. We thus decided to use the fundamental mode orthogonal fluxgate [2] (1 $\mathrm{pT/\sqrt{Hz}}$ @ 1 Hz) for the improved version of the device.
Left section of Fig. 1 shows the custom magnetometer with 24-bit ADC, $\pm$2 $\mu$T range and wireless data transfer. Board provides excitation and demodulation of a 60 mm long magnetic wire sensor with 2 $\mathrm{pT/\sqrt{Hz}}$ @ 1 Hz noise. The magnetometer is rotated along its axis at roughly 60 RPM using a rotational platform made out of non-magnetic components, an aluminum shaft and externally mounted stepper motor. The residual field amplitude and phase (direction in rotational plane) can be obtained either after secondary synchronous demodulation or sinusoidal fitting in post-processing.
We have surveyed the residual magnetic field in a one meter tall 6-layer permalloy magnetic shield. The low internal remanence is important not only for sensor calibrations but also for annealing of OFM sensors [2]. The vertical profile is seen in the middle section of Fig. 1. There are basically two spots of low field (<1nT) : at the height of 325 mm and below 100 mm from the bottom of the innermost layer. The higher position, however, has a disadvantage of rapid change of vector orientation.
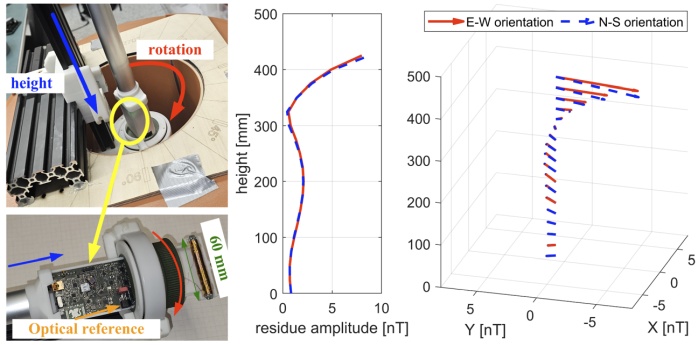
Fig. 1 (left) Magnetometer and rotation assembly. (right) Magnetic shielding residual field height profile and its 3D view for different orientation of the shielding in respect to Earth’s magnetic field.
Acknowledgements
This work was supported by the Grant Agency of the Czech Technical University in Prague, grant No. SGS22/171/OHK3/3T/13.
References
[1] M. Janosek, M. Dressler, and E. Saunderson, “Stabilized magnetic vacuum using a rotating fluxgate sensor,” 2020 IEEE SENSORS. IEEE, Oct. 25, 2020. doi: 10.1109/sensors47125.2020.9278793.
[2] M. Butta and B. P. Schutte, “Low-Noise Orthogonal Fluxgate Using Flipped Current Joule Annealing,” IEEE Transactions on Magnetics, vol. 55, no. 7. Institute of Electrical and Electronics Engineers (IEEE), pp. 1–6, Jul. 2019. doi: 10.1109/tmag.2019.2894302.
